
آموزش شبیه سازی دو آونگ
شبیه سازی دینامیکی یک سیستم پاندول دوتایی را می توان به راحتی با استفاده از ماژول Multibody Dynamics موجود در COMSOL Multiphysics انجام داد. این ماژول شبیهسازی مکانیکی مجموعههای بدنههای انعطافپذیر و صلب را ممکن میسازد، که اغلب با پدیدههای دیگر مانند گرما، الکتریکی و غیره همراه است.
آونگ دوبل چیست؟
آونگ دوتایی یک سیستم فیزیکی ساده است که از دو بازو تشکیل شده است که از طریق یک مفصل لولا به یکدیگر متصل می شوند. علیرغم اینکه یک سیستم ساده است، یک آونگ دوتایی نیز رفتار دینامیکی غنی با حساسیت قوی نسبت به شرایط اولیه از خود نشان میدهد و آن را به نمونهای از یک سیستم آشفته تبدیل میکند. یک آونگ دوتایی نیز یک سیستم مکانیکی بسیار غیرخطی و کم تحرک است.
یک مدل آونگ دوگانه در سیستم های کنترلی برای اندازه گیری اثربخشی الگوریتم های تثبیت کننده استفاده می شود. بسیاری از ساختارهای فیزیکی واقعی را می توان با یک آونگ دوتایی تقریب زد تا بینش بیشتری در مورد رفتار سیستم به دست آورد. برخی از کاربردهای معمولی عبارتند از تجزیه و تحلیل حرکت نوسان یک محموله در جرثقیل بالای سر، یا بهینه سازی یک ضربه تنیس، که در آن دو بازوی آونگ دوتایی راکت و ساعد هستند.
مدل سازی یک مفصل لولا
مفصل لولا که به نام اتصال پین نیز شناخته می شود، نوعی اتصال است که دو جزء را به گونه ای به هم متصل می کند که فقط اجازه چرخش به دور یکدیگر را دارند. این چرخش مجاز در یک جهت مشخص است که به عنوان محور چرخش شناخته می شود و در یک مکان مشخص به نام مرکز چرخش شناخته می شود.. محور چرخش و مرکز چرخش به طور کلی به یکی از اجزاء متصل هستند و در شبیه سازی های گذرا با آن جزء در فضا حرکت می کنند. همه انواع دیگر حرکت ممکن، یعنی انتقال یا چرخش بین دو جزء، توسط این نوع اتصال محدود میشوند. در نتیجه محدود کردن سایر حرکات ممکن، نیروها و گشتاورهای مربوط به درجات آزادی محدود از یک جزء به جزء دیگر از طریق این مفصل منتقل می شوند.
ماژول Multibody Dynamics یک ویژگی از پیش تعریف شده برای ایجاد اتصال لولا بین دو جزء ارائه می دهد. این ویژگی مفصل لولا در مدل آونگ دوتایی برای اتصال هر دو بازوی آونگ در مدل مثال ما استفاده می شود.
آموزش تصویری: شبیه سازی دو آونگ
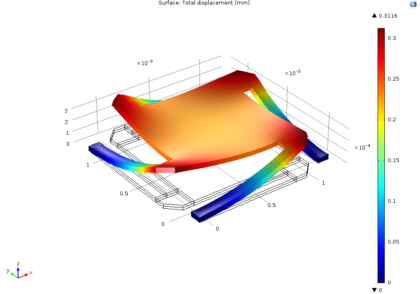
هدف از این ویدیو نشان دادن نحوه استفاده از ویژگی مفصل لولا در COMSOL Multiphyics برای مدلسازی یک آونگ دوتایی و انجام یک تحلیل گذرا است. در اینجا، بازوهای آونگ تحت یک بار گرانشی قرار می گیرند و حرکت نوسانی حاصل از آنها بررسی می شود. علاقه خاص ما در محاسبه نیروهای تجربه شده توسط مفصل لولا و ردیابی مکان نوک پایین آونگ است. در اینجا هر دو بازوی آونگ اجزای انعطاف پذیری هستند که به ما آزادی عمل می دهند تا تنش های ایجاد شده در بازوها را ارزیابی کنیم.
رونویسی ویدیو
این ویدئو مدلسازی یک آونگ دوتایی را با استفاده از ماژول دینامیک چند بدنه موجود برای استفاده با ماژول مکانیک سازه نشان میدهد.
هدف اصلی این مدل انجام یک تحلیل چندبدنی انعطاف پذیر است. در اینجا، ویژگیهای موجود در ماژول Multibody Dynamics را برای مدلسازی فعل و انفعالات بین اجزای مکانیکی، مانند نیروهای مشترک و ردیابی حرکت، نشان میدهیم. ما یک تجزیه و تحلیل گذرا از حرکت دوتایی آونگ انجام خواهیم داد و مکان نوک پایین آونگ دوتایی را که تحت بار گرانشی نوسان میکند، ردیابی میکنیم.
3D را به عنوان بعد فضایی انتخاب کنید و Multibody Dynamics را از شاخه Structural Mechanics انتخاب کنید. نوع مطالعه «وابسته به زمان» را انتخاب کنید و روی دکمه پایان کلیک کنید.
روی گره هندسی کلیک راست کرده و گزینه Insert sequence from file را انتخاب کنید. به پوشه Model Library مدل بروید و دنباله هندسی را از فایل آونگ دوتایی وارد کنید.
برای روش Finalization، مطمئن شوید که یک “Assembly” تشکیل داده اید و برای ساخت دنباله روی گره Geometry کلیک راست کنید. برای کمک به تعریف مفصل بعداً، انتخاب های واضحی را روی پین لولا و لولای بشکه ایجاد کنید. برای تجسم بهتر مرزهای پین، میتوانیم لولای بشکه را پنهان کنیم. مرز را به عنوان سطح موجودیت هندسی انتخاب کنید و یک مرز روی سطح پین انتخاب کنید. سپس گزینه «گروه با مماس پیوسته» را علامت بزنید تا مرزهای دیگر پین را اضافه کنید. لولای بشکه را از حالت مخفی خارج کنید و برای تکرار فرآیند انتخاب و ایجاد برای مرزهای داخلی لولای بشکه، یک اکسپلیت دوم ایجاد کنید. این بار پین لولا را پنهان کنید، مرز را انتخاب کنید و روی یک مرز داخلی لوله لولا کلیک کنید. برای انتخاب تمام مرزهای داخلی، گزینه “گروه بر اساس مماس پیوسته” را علامت بزنید.
یک صراحت سوم ایجاد می شود و از همان فرآیند انتخاب مرز برای ایجاد گروهی از مرزها استفاده می شود که آونگ حول آن می چرخد. در زیر گره Materials، مرورگر Material را باز کنید و از کتابخانه داخلی، آلومینیوم را برای هر دو جزء آونگ به مدل اضافه کنید.
اکنون تنظیمات فیزیک را برای مسئله چند جسمی انعطاف پذیر آغاز می کنیم. از گره Multibody Dynamics، یک پیوست با استفاده از گروه مرزها از اولین توضیح ایجاد کنید. یک پیوست دوم با مرزهای صریح دوم ایجاد کنید. اکنون می توان از این دو پیوست برای ایجاد و تعریف یک مفصل لولای موجود در گره Multibody Dynamics در منوی مشترک استفاده کرد. در پنجره تنظیمات مشترک، می توانید با گسترش زبانه Sketch، طرح مشترک را مشاهده کنید. در پنجره انتخاب پیوست، پیوست 1 را به عنوان منبع و پیوست 2 را به عنوان پیوست مقصد انتخاب کنید. مرکز منبع را به عنوان مرکز اتصال نگه می داریم و مشخص می کنیم که محور مفصل در امتداد محور y باشد.
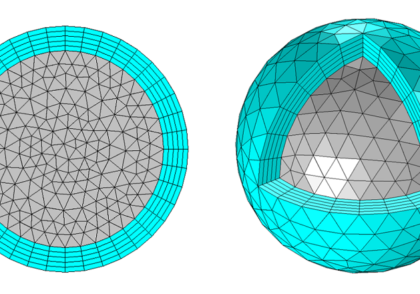
با استفاده از سه مرز صریح برای چرخش آونگ به اطراف، یک شرط مرزی اتصال صلب ایجاد کنید. جابجایی ها را در تمام جهات x، y و z تجویز کنید، سپس چرخش را حول محورهای x و z محدود کنید و چرخش را به جهت y محدود کنید. از گره دینامیک Multibody، یک بار بدنه اضافه کنید و هر دو دامنه را به انتخاب اضافه کنید. نیروی بار بدنه برابر با وزن هر دو جزء است. تنظیمات مش پیش فرض را برای این مدل نگه دارید و مش را بسازید.
به گره وابسته به زمان مرحله 1 بروید و در قسمت ویرایش زمان، محدوده ای را برای 20 ثانیه با اندازه گام 0.025 ثانیه تعریف کنید. روی Study1 کلیک راست کرده و compute را بزنید.
اکنون می توان تحلیل مورد نیاز را بر روی مدل حل شده انجام داد. نمودارهای پیش فرض برای مشاهده جابجایی و سرعت مؤلفه ایجاد می شوند. شما می توانید نتایج را در هر یک از 800 نتیجه حل شده در این مدل مشاهده کنید. روی «نتایج» کلیک راست کرده و «گروه طرح 1 بعدی» را اضافه کنید، سپس روی گروه طرح 1 بعدی کلیک راست کرده و یک طرح «جهانی» اضافه کنید. روی جایگزین عبارت کلیک کنید و به Multibody Dynamics، مفصل های لولا، مفصل لولا 1، نیروی مفصل بروید و جزء x را انتخاب کنید. اکنون می توانید این عبارت را کپی کرده و در فیلدهای زیر پیست کنید و پسوند x را به ترتیب با y و z جایگزین کنید. برای مشاهده نیروهای مشترک در زمان های مختلف روی نمودار کلیک کنید. یک “گروه طرح 1 بعدی” دیگر، با یک نمودار “نقطه” این بار ایجاد کنید و هر نقطه را در پایین صفحه به انتخاب اضافه کنید. در قسمت عبارت عبارت “z” را تایپ کنید. در قسمت عبارت برای محور x این نمودار، ‘x’ را تایپ کنید.
بیشتر خواندن
- برای اطلاعات بیشتر مدل Dynamics of Double Pendulum ما را بررسی کنید . اگر وارد حساب COMSOL Access خود شوید، می توانید مستندات این مدل را نیز دانلود کنید. در این مدل آموزشی، ویژگیهای اضافی موجود در مفصل لولا ، مانند محدودیتها، قفل، فنر و دمپر، و حرکت تجویز شده نیز نشان داده شدهاند.
- ماژول Multibody Dynamics را کاوش کنید
- لینک دانلود به صورت پارت های 1 گیگابایتی در فایل های ZIP ارائه شده است.
- در صورتی که به هر دلیل موفق به دانلود فایل مورد نظر نشدید به ما اطلاع دهید.
برای مشاهده لینک دانلود لطفا وارد حساب کاربری خود شوید!
وارد شویدپسورد فایل : پسورد ندارد گزارش خرابی لینک
دیدگاهتان را بنویسید