
استفاده از عملگرهای اکستروژن عمومی برای مدل سازی چرخش
یکی از موقعیت های رایج مدل سازی که با آن مواجه هستیم، شبیه سازی اجسام در حال چرخش در معرض بار است. راه های زیادی وجود دارد که از طریق آنها می توان چنین چرخشی را مدل کرد. در این پست وبلاگ، به بررسی این موضوع با استفاده از عملگرهای اکستروژن عمومی خواهیم پرداخت و در مورد اینکه چرا این رویکرد مفید است، بحث خواهیم کرد.
یک مثال عملی: پختن گوشت با چرخش
موقعیت های زیادی وجود دارد که در آن یک جسم در حال چرخش در معرض بار قرار می گیرد. به عنوان مثال، به یک مرغ جوجه گردان یا یک کباب فکر کنید . گوشت روی یک تف چرخان در معرض بار گرمایی قرار می گیرد که معمولاً یک منبع حرارتی تابشی مانند زغال سنگ است. چرخش یک راه ساده برای توزیع گرمای اعمال شده است. از گرم یا خیلی سرد شدن هر منطقه ای جلوگیری می کند و راهی آسان برای ترویج پخت و پز یکنواخت است.
حالا که مجبورم کردید کاسه هایتان را لیسید، اجازه دهید به یک مورد کمی ساده تر نگاه کنیم.
یک ویفر سیلیکونی چرخان گرمایش لیزری را تجربه می کند
امروز به گرمایش لیزری یک ویفر سیلیکونی در حال چرخش خواهیم پرداخت. اگرچه فکر کردن به آن به اندازه غذای چرخان خیلی خوشمزه نیست، مطمئنم که شما هم به همان اندازه آموزنده خواهید بود.
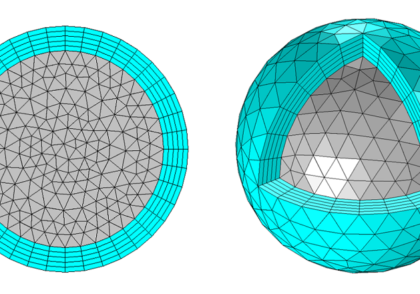
همانطور که می دانید، ما قبلاً نمونه ای از این را در کتابخانه مدل و گالری مدل آنلاین خود داریم . مثال موجود، ویفری را در نظر میگیرد که بر روی یک مرحله چرخان نصب شده و توسط لیزری که به جلو و عقب از سطح عبور میکند، گرم میشود. مشکل در یک سیستم مختصات ثابت حل شده است. (فقط به خودتان فکر کنید که بیرون اتاق فرآیند ایستاده اید و ویفر را که روی صحنه می چرخد تماشا می کنید.) ما به این سیستم مختصات جهانی می گوییم .
لیزر به عنوان منبع گرمایی مدلسازی میشود که در امتداد محور x جهانی به جلو و عقب حرکت میکند ، در حالی که ویفر حول محور z جهانی میچرخد . چرخش ویفر از طریق ویژگی حرکت انتقالی در رابط فیزیک جامدات انتقال حرارت مدلسازی میشود که یک عبارت همرفتی را به معادله انتقال حرارت گذرا حاکم اضافه میکند:
سمت راست معادله بالا چرخش ویفر را به عنوان محاسبه می کند، بردار سرعت. این بردار سرعت را می توان به عنوان ورود و خروج مواد از هر عنصر در شبکه المان محدود تفسیر کرد – یعنی ما در حال حل یک مسئله در یک قاب اویلری هستیم. از آنجایی که هندسه یک دیسک یکنواخت است و بردار سرعت اعمال شده چرخش حول محور دیسک را توصیف می کند، این یک رویکرد معتبر است.
اما نقطه ضعف زمانی است که می خواهید فیزیک بیشتری به مدل اضافه کنید. ویژگی Translational Motion فقط در فیزیک انتقال حرارت و برای بسیاری از رابطهای فیزیکی دیگر که نمیخواهیم در فریم اویلری حل کنیم، موجود است.
به جای حل این مشکل در یک قاب اویلری در سیستم مختصات جهانی، میتوانیم این مشکل را روی یک قاب لاگرانژی حل کنیم، با یک سیستم مختصات چرخشی که با چرخش مواد ویفر حرکت میکند. (خودتان را به عنوان یک شخص کوچک که روی سطح ویفر ایستاده در نظر بگیرید. محیط اطراف به نظر می رسد در حال چرخش است، در حالی که ویفر ثابت به نظر می رسد.)
سمت راست معادله انتقال حرارت حاکم در بالا صفر می شود، اما اکنون باید بار گرمایی را در نظر بگیریم که نه تنها در امتداد محور x جهانی به جلو و عقب حرکت می کند، بلکه حول محور z سیستم مختصات دوار ما نیز می چرخد. . اگرچه این ممکن است پیچیده به نظر برسد، اما اجرای آن کاملاً ساده است.
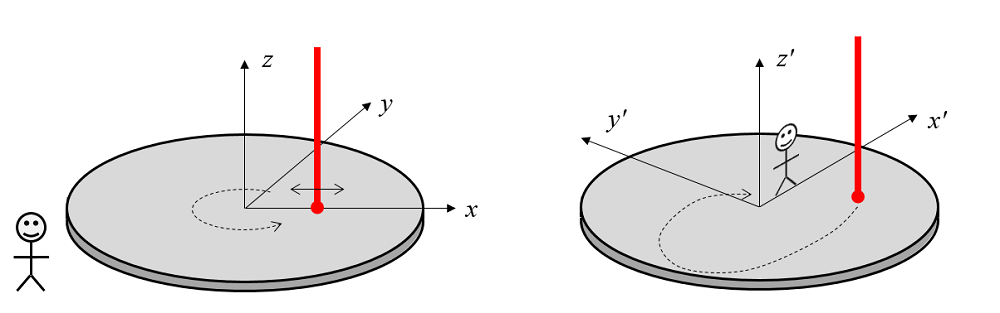
یک ناظر در سیستم مختصات جهانی یک ویفر در حال چرخش را با یک منبع حرارت لیزری می بیند که در امتداد محور x (سمت چپ) به جلو و عقب حرکت می کند. یک ناظر در یک سیستم مختصات که با ویفر می چرخد، ویفر را ثابت می بیند، اما منبع گرما در یک مسیر پیچیده در صفحه x – y حرکت می کند (راست.)
پیاده سازی چرخش از طریق اپراتورهای اکستروژن عمومی
عملگرهای اکستروژن عمومی مکانیزمی را برای تبدیل میدان ها از یک سیستم مختصات به سیستم دیگر ارائه می کنند. برخی از برنامههایی که قبلاً درباره آنها نوشتهایم عبارتند از مدلسازی فرعی ، جفت کردن رابطهای فیزیکی مختلف و ارزیابی نتایج در یک نقطه متحرک .
در اینجا از عملگرهای اکستروژن عمومی برای اعمال تبدیل چرخشی به بارهای اعمال شده استفاده خواهیم کرد. بارهای ما در سیستم مختصات دوار از طریق تبدیل مختصات از سیستم مختصات جهانی داده شده توسط ماتریس چرخش اعمال می شوند:
میتوانیم با گرمایش لیزری موجود در یک نمونه ویفر سیلیکونی شروع کنیم و به سادگی ویژگی حرکت ترجمهای موجود را حذف کنیم. سپس باید یک عملگر General Extrusion اضافه کنیم که تبدیل فوق را اجرا می کند، همانطور که در تصویر زیر نشان داده شده است. ما همچنین می خواهیم عملگر دومی را پیاده سازی کنیم که تبدیل معکوس را اعمال می کند، که با تغییر علامت چرخش انجام می شود.
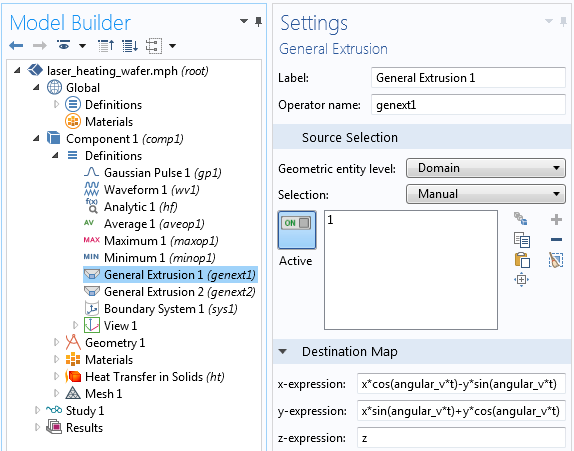
عملیات اکستروژن عمومی یک تبدیل چرخشی اعمال می کند.
بار حرارتی اعمال شده از طریق یک تابع تعریف شده توسط کاربر، hf(x,y,t) توصیف میشود که نحوه حرکت بار حرارتی لیزر در امتداد محور x در سیستم مختصات جهانی را توضیح میدهد . این بار متحرک سپس از طریق عملگر General Extrusion به سیستم مختصات دوار تبدیل می شود، همانطور که در تصویر زیر نشان داده شده است.
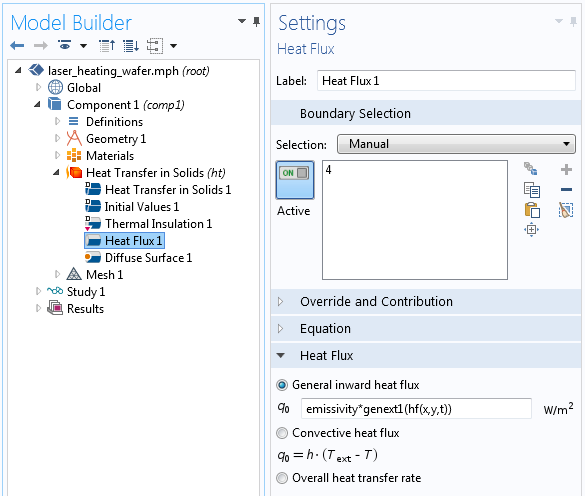
بار حرارتی اعمال شده در سیستم مختصات دوار، از طریق سیستم مختصات جهانی و تبدیل چرخشی تعریف شده است.
همین – می توانید مدل را درست مثل قبل حل کنید.
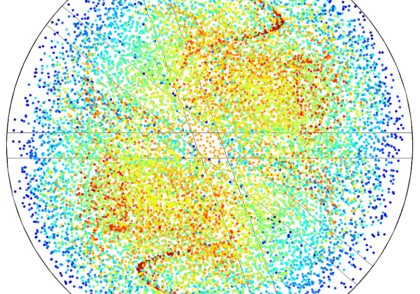
نتایج اکنون با توجه به سیستم مختصات دوار خواهد بود. ترسیم محلول دما با توجه به سیستم مختصات جهانی با استفاده از عملگر اکستروژن عمومی که تبدیل معکوس را اعمال می کند، برای ما عملی تر است . این به ما تصویری از میدان دما را می دهد که گویی در خارج از محفظه فرآیند ایستاده ایم و در حال تماشای ویفر چرخان با یک دوربین حرارتی هستیم.
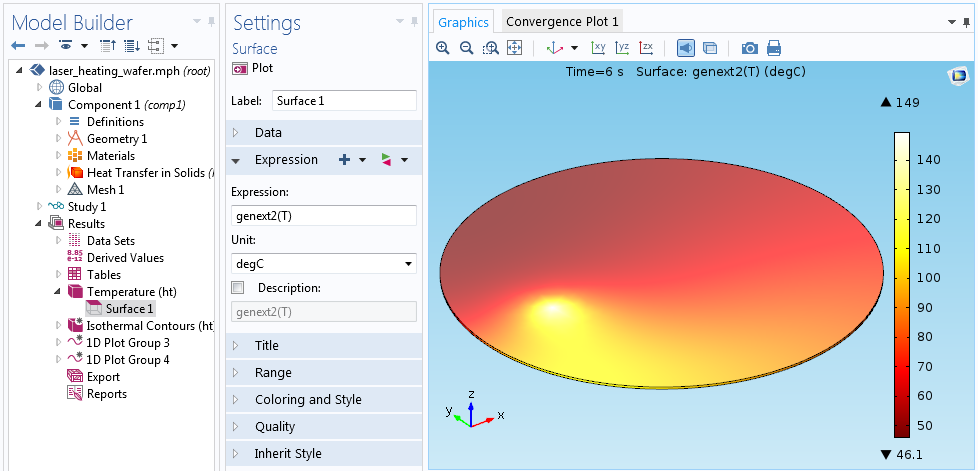
دومین عملگر اکستروژن عمومی برای چرخاندن نتایج به سیستم مختصات جهانی استفاده می شود.
نتایجی که اظهار شده
نتایج شبیهسازی میدان دما در طول زمان بدون توجه به اینکه از ویژگی Translational Motion یا عملگر General Extrusion استفاده میکنید، یکسان خواهد بود. اگرچه اپراتور General Extrusion به تلاش بیشتری برای پیاده سازی نیاز دارد – و حل آن کمی بیشتر طول می کشد – اگر به چیزی بیش از راه حل حرارتی علاقه دارید، لازم است.
به عنوان مثال، اگر شما همچنین نیاز به محاسبه یک فرآیند انتشار و واکنش شیمیایی مبتنی بر دما یا تکامل تنشهای حرارتی در طول گرمایش ویفر دارید، این مشکلات باید در یک سیستم مختصاتی که با ویفر میچرخد حل شود.
البته برنامه های بسیاری دیگر وجود دارد که می توانید از عملگر General Extrusion استفاده کنید، اما امیدوارم اشتهای شما را برای امروز راضی کرده باشم!
- لینک دانلود به صورت پارت های 1 گیگابایتی در فایل های ZIP ارائه شده است.
- در صورتی که به هر دلیل موفق به دانلود فایل مورد نظر نشدید به ما اطلاع دهید.
برای مشاهده لینک دانلود لطفا وارد حساب کاربری خود شوید!
وارد شوید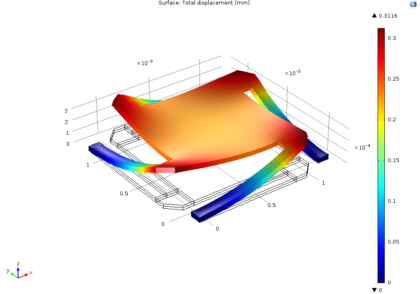
دیدگاهتان را بنویسید