
شبیه سازی گاورنر موتور، گاورنر گریز از مرکز با فنر
احتمالاً همه ما نیروی گریز از مرکز را به روشی دیدهایم، چه در کودکی سوار بر چرخ و فلک، چرخاندن یک سطل آب برعکس و مشاهده محتویات داخل سطل، یا مشاهده تماشای گل و لای که از لاستیک چرخان می چرخد. علاوه بر ساخت کارناوال سواری سرگیجهآور، میتوان از این نیرو در طراحی بسیاری از کاربردهای مکانیکی استفاده کرد، جایی که از آن برای کنترل انواع افکتها استفاده میشود. یکی از این نمونه ها گاورنر گریز از مرکز (یا گاورنر موتور) است که در آن از نیروی گریز از مرکز برای تنظیم سوخت رسانی به موتور استفاده می شود.

یک فرماندار گریز از مرکز در یک موتور بخار از سال 1788. این
موتور بخار در حال حاضر در موزه علوم لندن، انگلستان است.
تخصیص تصویر: دکتر جونگ .
گاورنر موتور چگونه کار می کند؟
اگرچه اولین گاورنرهای گریز از مرکز به سال 1788 برمیگردد، زمانی که برای اولین بار توسط جیمز وات ثبت اختراع شدند ، اما اصل کلی طراحی آنها از آن زمان تغییر بسیار کمی داشته است و هنوز هم میتوان آنها را در موتورهای مدرن یافت. اولین گاورنرهای گریز از مرکز، مانند تصویر بالا، در موتورهای جریانی استفاده میشدند که در آنها سرعت موتور را با کنترل مقدار بخار مجاز به داخل سیلندر تنظیم میکردند. امروزه گاورنرهای گریز از مرکز بیشتر در موتورهای احتراق داخلی و توربین ها یافت می شوند.
قبل از شروع ساخت و تجزیه و تحلیل مدل خود، بیایید نگاهی به قطعات یک گاورنر موتور معمولی بیندازیم:

یک گاورنر گریز از مرکز، متشکل از یک دوک، دو بازو، دو پیوند، دو توپ پرواز و یک آستین.
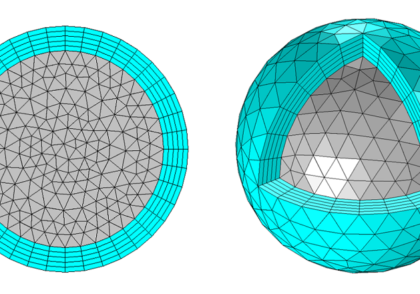
در نمودار نشان داده شده در بالا، می توانیم هندسه یک گاورنر گریز از مرکز با فنر را مشاهده کنیم. در این مدل اسپیندل به محور خروجی موتور متصل می شود که میزان سوخت ورودی به سیلندر موتور را از طریق دریچه گاز تنظیم می کند. گاورنر زمانی فعال می شود که نیروی تامین شده توسط شفت خروجی موتور باعث می شود که اسپیندل با سرعت خاصی بچرخد. چرخش سریعتر باعث می شود انرژی جنبشی بیشتری وارد سیستم شود. اینجاست که نیروی گریز از مرکز وارد عمل میشود – از آنجایی که دوک با سرعت بیشتر و سریعتر میچرخد، حرکت چرخشی باعث میشود که فلایبالها به سمت بیرون کشیده شوند، که به نوبه خود باعث بالا رفتن آستین، پیوندها و بازوها میشود. اگر فلای بال ها به اندازه کافی بالا بروند (به این معنی که آستانه خاصی از انرژی جنبشی از موتور به سیستم منتقل شده است)، سپس حرکت بازوها دیافراگم دریچه گاز را کاهش می دهد. سوپاپ گاز سرعت ورود سوخت به سیلندر را کاهش می دهد و در نتیجه دور موتور را کاهش می دهد. تصویر زیر جابجایی قسمت های مختلف گاورنر را نشان می دهد که فلای بال ها در واکنش به سرعت موتور بالا آمده اند.

جابجایی آستین، فلای بال، بازوها و پیوندها در پاسخ به سرعت موتور. رنگ ها جابجایی را بر حسب متر نشان می دهند.
یک قطعه اضافی در این گاورنر موتور وجود دارد، یعنی فنر. اگرچه فنر را در مدل نمی بینید، تصور کنید که آستین را به بالای دوک متصل می کند تا وقتی آستین از دوک بالا می رود، فنر را فشرده می کند. فنر حرکت رو به بیرون فلای بال ها را محدود می کند و با بالا آمدن فلای بال ها، فنر موقعیت های مختلف تعادل آستین را در طول دوک ایجاد می کند. این موقعیتهای تعادلی در دور مشخصی از دوک در دقیقه اتفاق میافتند – در سرعتهای مختلف، حرکت رو به بالا فلایبالها به دلیل نیروی گریز از مرکز و نیروی رو به پایین فنر فشردهشده فزاینده، نیروی خالص صفر دارند، و آستین در یک موقعیت خاص در امتداد حرکت ثابت میماند. دوک. بسته به دور در دقیقه اسپیندل، آستین دارای موقعیت های تعادلی مختلف در امتداد دوک است.
شبیه سازی یک گاورنر گریز از مرکز
ما میتوانیم از ماژول Multibody Dynamics برای شبیهسازی رفتار گاورنر، تحلیل تنش در مفاصل و تعیین موقعیتهای تعادلی حرکت لغزشی آستین در طول دوک استفاده کنیم. در مدل ما، مفاصل لولا بازوها را به فلای بال ها و پیوندها را به آستین متصل می کنند. خود آستین با استفاده از یک مفصل منشوری روی دوک نصب می شود و می تواند آزادانه روی دوک به بالا و پایین بلغزد. اتصالات لولا در این مدل دارای یک درجه آزادی چرخشی و مفصل منشوری دارای یک درجه آزادی انتقالی در امتداد محور دوک می باشد.
تصویر زیر تنش فون میزس را در بازوها و پیوندهای گاورنر نشان میدهد، که تجسم میکند که تنش بیشتر در نزدیکی مفاصل متمرکز است.

فون میزس روی بازوها و پیوندهای گاورنر موتور تاکید می کند.
علاوه بر این، ما می توانیم از شبیه سازی برای تجزیه و تحلیل جابجایی آستین در طول طول دوک استفاده کنیم. در شکل زیر نمودار جابجایی در برابر تعداد دور دوک را می بینیم. همانطور که در نمودار مشاهده می شود، دو موقعیت تعادل بین 0 تا 8 دور دوک وجود دارد. درست پس از 2 دور، از آنجایی که دور در دقیقه شفت افزایش یافته است، تعادل بین 0.033 و 0.038 متر به موقعیت جدیدی منتقل می شود.

جابجایی نسبی و موقعیت های تعادل آستین نسبت به دوک.
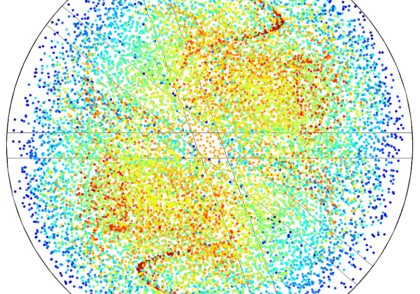
در پرتره فاز زیر، ما می توانیم جابجایی نسبی حرکت لغزشی آستین را ببینیم. این نمودار تجزیه و تحلیل دقیق تری از حرکت آستین به ما می دهد و به وضوح دو موقعیت تعادل را نشان می دهد.

پرتره فازی حرکت کشویی آستین در امتداد دوک.
دانلود مدل
- لینک دانلود به صورت پارت های 1 گیگابایتی در فایل های ZIP ارائه شده است.
- در صورتی که به هر دلیل موفق به دانلود فایل مورد نظر نشدید به ما اطلاع دهید.
برای مشاهده لینک دانلود لطفا وارد حساب کاربری خود شوید!
وارد شوید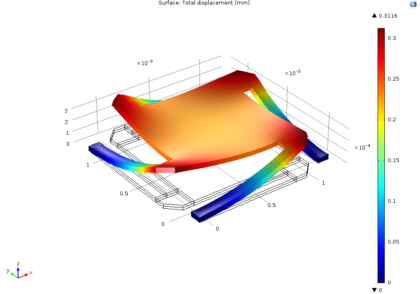
دیدگاهتان را بنویسید