
مدل سازی شتاب سنج میکروماشین سطحی
ریزماشین کاری سطحی فرآیندی است که برای ساخت دستگاه های MEMS استفاده می شود که شامل شتاب سنج ها می شود. در این پست وبلاگ، ما میدان الکتریکی و نیروهای درون یک شتابسنج را مدلسازی میکنیم و همچنین یک ویژگی هندسی جدید موجود در COMSOL Multiphysics نسخه 5.0 را برجسته میکنیم.
مقدمه ای بر ریز ماشینکاری سطحی
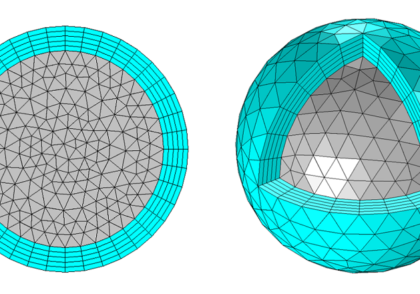
در میان فناوریهای تولید MEMS، ریزماشین کاری سطحی به دلیل توانایی آن در ادغام اجزای الکترونیکی و قطعات مکانیکی آزادانه در حال حرکت بر روی یک بستر شناخته شده است. فرآیند ساخت با رسوب لایه های نازک در بالای یک بستر سیلیکونی آغاز می شود. سپس این لایههای ساختاری مختلف به صورت انتخابی حکاکی میشوند تا قطعات متحرک آزاد شوند و ساختار مورد نظر ایجاد شود.
این شکل از ریزماشینکاری با داشتن هزینه کم و قابلیت تولید در حجم بالا، زمینه های کاربردی مختلفی را در ساخت دستگاه MEMS پیدا کرده است. یک مثال شتابسنج میکروماشینشده سطحی است. این نوع شتاب سنج به ویژه به دلیل کاربرد مهم آن در راه اندازی کیسه های هوا در خودروها مورد توجه قرار گرفته است.
اکنون که اطلاعات پس زمینه ای در مورد فرآیند تولید به دست آورده ایم، بیایید به مدل سازی این دستگاه بپردازیم.
بلوک های ساختمانی مدل شتاب سنج میکروماشین سطحی
مدل شتابسنج میکروماشینشده سطحی بر اساس مطالعه موردی از کتاب طراحی میکروسیستم نوشته استفان دی سنتوریا است. با استفاده از پلی سیلیکون به عنوان مصالح ساختمانی، این مدل از یک جرم مقاوم آزاد شده تشکیل شده است که توسط فنرهای لنگر در هر دو انتها پشتیبانی می شود، همراه با الکترودهای حسگر و خودآزمایی که تا دو طرف دستگاه گسترش می یابند.
بلوکهای ساختمانی هندسی – جرم اثبات با الکترودهای متصل، فنر تا شده، و آرایه الکترود ثابت – بهعنوان دنبالههای بعدی در فرآیند ساخت هندسه در COMSOL Multiphysics پیادهسازی میشوند، به طوری که بلوکهای ساختمان را میتوان در یک فایل مدل منبع ذخیره کرد. با پیوند دادن به Subsequences در فایل مدل منبع، میتوان از همین بلوکهای ساختمانی هندسی در فایلهای مدل جایگزین استفاده کرد. این قابلیت توسط ویژگی هندسه Subsequences پیوند داده شده است که برای اولین بار در COMSOL Multiphysics نسخه 5.0 معرفی شد .
دنباله ها می توانند چندین آرگومان داشته باشند که منجر به ابعاد، جهت گیری ها، موقعیت ها و تعداد ویژگی های متفاوت می شود. در مثال زیر، دو آرایه الکترود با یک Subsequence تشکیل شدهاند، اما مجموعهای از آرگومانهای متفاوتی دارند. این بر تعداد الکترودها، ابعاد و نحوه جهت گیری لنگرها در هر آرایه تأثیر می گذارد.
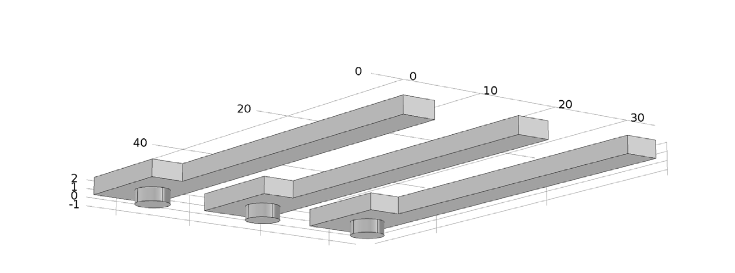
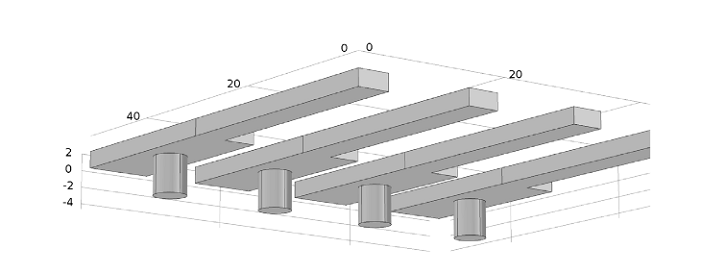
آرایههای الکترود از یک Subsequence ساخته شدهاند، اما دارای مجموعههای مختلفی از آرگومانها هستند. این منجر به ابعاد مختلف، جهت گیری پد لنگر و تعداد الکترودها می شود.
هنگامی که شتاب به دستگاه اعمال می شود – در این مورد، با استفاده از ویژگی دامنه بار بدن – نیروی بازگرداننده از فنرها باعث جابجایی در جرم اثبات می شود که متناسب با شتاب است. این تغییر مکان به نوبه خود بر ظرفیت بین الکترودهای ثابت و متحرک تأثیر می گذارد، تغییری که می تواند با مدارهای استاندارد مختلف اندازه گیری شود.
با رابط الکترومکانیک ، میتوانیم میدان الکتریکی را در شکافهای تغییر شکل بین الکترودها مدلسازی کنیم. این رابط فیزیک همچنین به ما اجازه می دهد تا نیروهای الکترواستاتیکی خودآزمایی را به جامدات اعمال کنیم، که تغییر شکل متناظری را در ساختار ایجاد می کند.
نتایج مدلسازی
مطالعه اول
مطالعه اولیه ما با تجزیه و تحلیل جابجایی در حوزه های پلی سیلیکونی مدل پس از شتاب اعمالی 50 گرم آغاز می شود. حرکتی در حدود 0.07 میکرومتر در جرم اثبات، از جمله الکترودهای متحرک متصل مشاهده می شود. در حالی که حرکت بسیار کمی در پایه های فنر لنگر انداخته و الکترودهای ثابت دیده می شود، همانطور که پیش بینی شد، تغییر مکان در طول فنرهای تا شده مشاهده می شود.
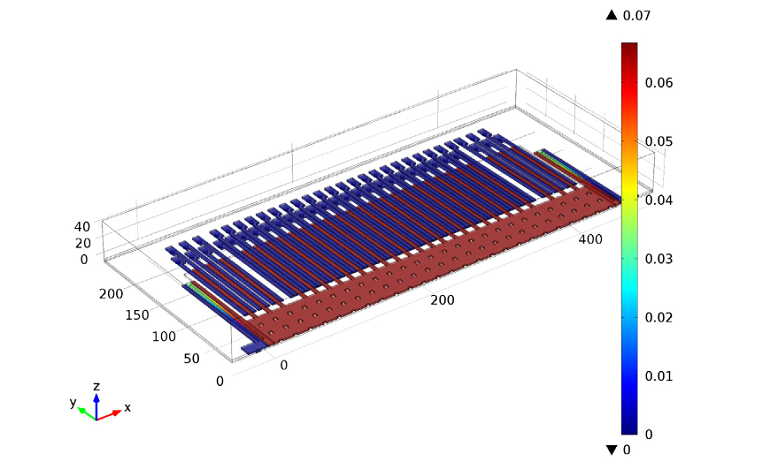
جابجایی حاصل از شتاب اعمالی 50 گرم.
علاوه بر این، این مطالعه رابطه خطی بین شتاب اعمال شده و جابجایی را برجسته می کند. اندازه گیری جابجایی از جفت خازنی بین الکترودهای حس متحرک و ثابت به دست می آید.
در یک دستگاه واقعی، یک ولتاژ متناوب موج مربعی به الکترودهای حسی ثابت اعمال می شود. هنگامی که شتاب اعمال شده باعث حرکت جرم اثبات می شود، یک ولتاژ متناوب که متناسب با جابجایی است در نتیجه این جفت شدن خازنی بین الکترودهای متحرک و ثابت القا می شود. این تنظیمات پردازش سیگنال را در مدار متصل شده آسان تر می کند. در مدل ساده شده ما، تنها نیمی از موج مربعی به عنوان یک مسئله ثابت مدل شده است تا در زمان محاسبات بدون از دست دادن کلیت صرفه جویی شود.
مطالعه دوم
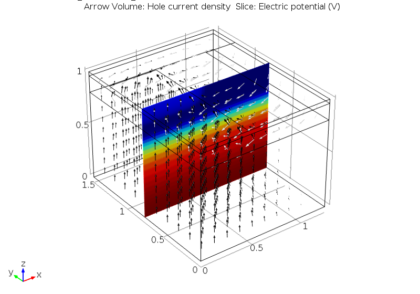
سپس توجه خود را به الکترودهای خودآزمایی شتاب سنج معطوف می کنیم. در اینجا، جابجایی را که در حوزههای پلی سیلیکون هنگام اعمال 0 ولت به الکترودهای ثابت در سمت چپ الکترودهای متحرک که به جرم اثبات وصل شدهاند، تجزیه و تحلیل میکنیم. یک بایاس 2 ولتی برای آنهایی که در سمت راست قرار دارند اعمال می شود. نتایج حرکتی در جرم اثبات حدود 0.02 میکرومتر را نشان میدهد، قدری که برای هدف خودآزمایی به اندازه کافی بزرگ است.
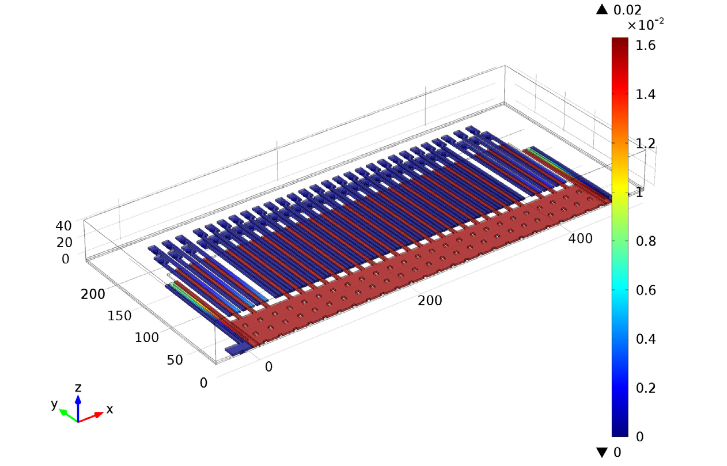
جابجایی به دنبال ولتاژ خودآزمایی
هنگام مقایسه جابجایی بین اعمال بایاس خودآزمایی به مجموعه الکترودهای ثابت در سمت چپ الکترودهای متحرک در مقابل الکترودهای سمت راست، مقادیر جابجایی به اندازه یکسان هستند. نشانه های مخالف این نتیجه مطابقت با پیشبینی از تقارن را نشان میدهد.
خلاصه
در این پست وبلاگ، ما به شما نشان دادهایم که چگونه یک شتابسنج میکروماشین سطحی را مدلسازی کنید و جابهجایی درون دستگاه را در پاسخ به نیروهای الکتریکی تجسم کنید. علاوه بر این، ما استفاده از ویژگی جدید هندسه زیرپیشهای پیوندی را نشان دادهایم و بر نقش آن در کارآمدتر کردن فرآیند ساخت هندسه تأکید کردهایم.
خودت آن را امتحان کن
- دانلود مدل شتاب سنج میکروماشین سطحی
- لینک دانلود به صورت پارت های 1 گیگابایتی در فایل های ZIP ارائه شده است.
- در صورتی که به هر دلیل موفق به دانلود فایل مورد نظر نشدید به ما اطلاع دهید.
برای مشاهده لینک دانلود لطفا وارد حساب کاربری خود شوید!
وارد شوید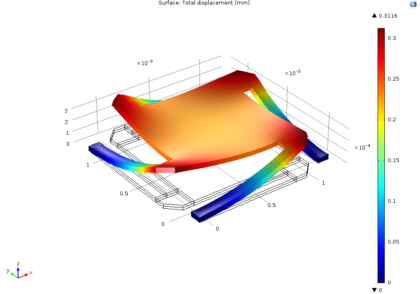
دیدگاهتان را بنویسید