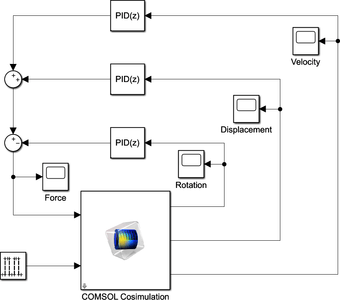
کنترل آونگ معکوس – کامسول
راهنمای دانلود:
- لینک دانلود به صورت پارت های 1 گیگابایتی در فایل های ZIP ارائه شده است.
- در صورتی که به هر دلیل موفق به دانلود فایل مورد نظر نشدید به ما اطلاع دهید.
دانلود فایل
برای مشاهده لینک دانلود لطفا وارد حساب کاربری خود شوید!
وارد شوید
محل نمایش فرم گزارش مشکل دانلود شما.